Control and Control Platform, Flyinglet Cloud
Spatial data obtained through robots, structured into a systematic virtual space, provides a digital twin for advanced robotic services
Hyper-connectivity ‘Flyinglet‘ cloud, which works with intelligent robots anytime, anywhere and captures services.
Flyinglet controls intelligent robot device information, abnormal information, customer congestion, and spatial information, sets and automates various collaboration missions and schedules to maximize the function and utilization of advanced robots and improve safety.
Observability,
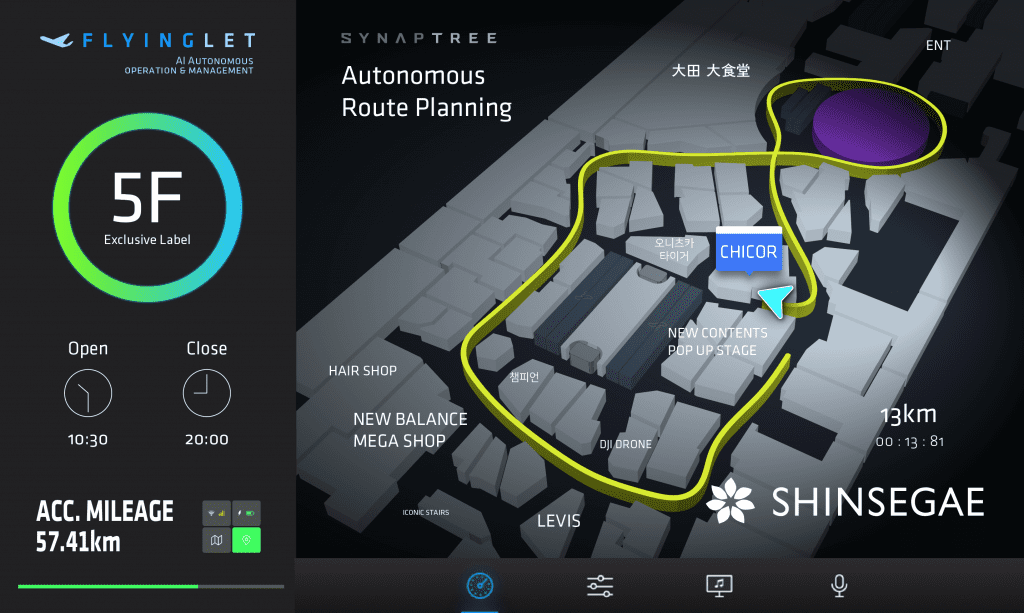
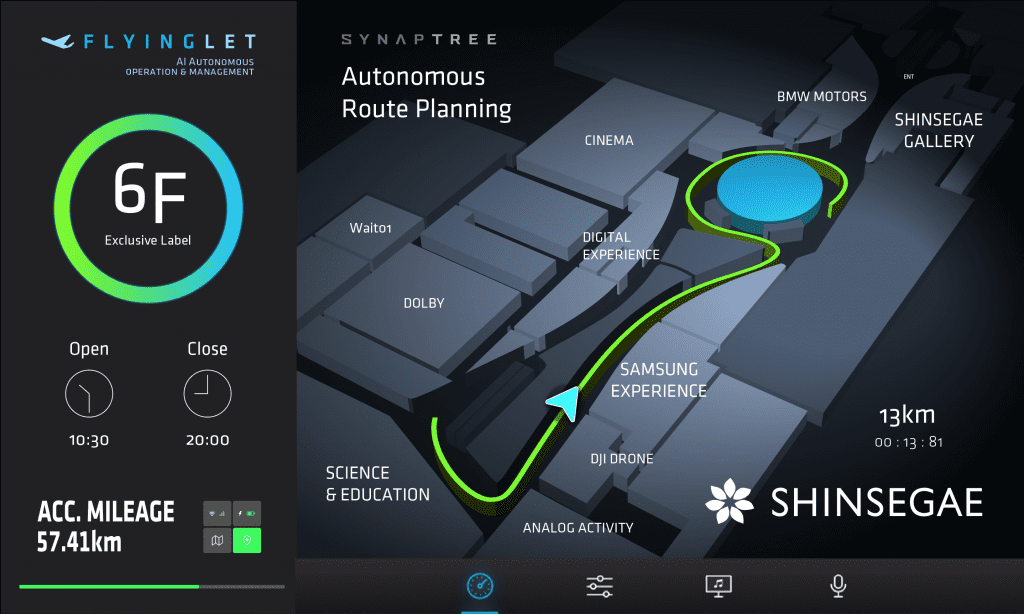
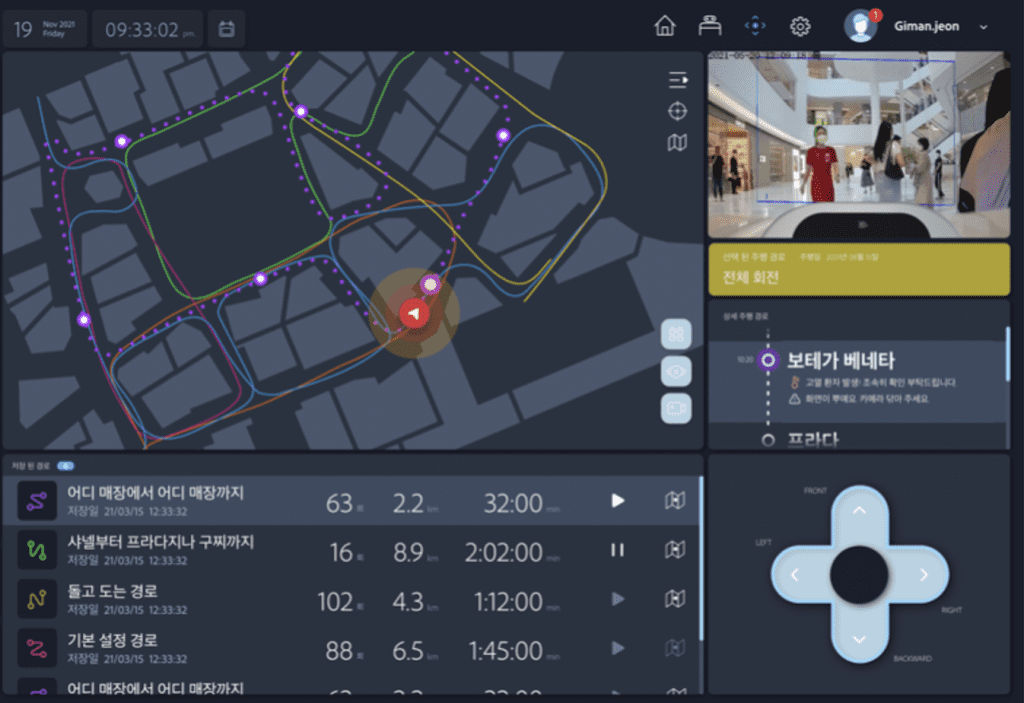
Flyinglet creates a structured metadata virtualization map based on indoor space datasets and provides a robust visualization interface.
Indoor spaces without GPS signals do not have sophisticated coordinate systems. Flyinglet analyzes indoor spatial data obtained in real time from the robot and provides an algorithm for locating precise location data. By constructing a sophisticated virtual map with a location metaphor, it accurately controls the location and service of the actual robot and enables a variety of digital services. This Synaptree dataset for indoor spatial information and positioning is structured as a virtualized digital map with metadata to visualize the robot’s precise current location and trajectory.
Responsiveness,
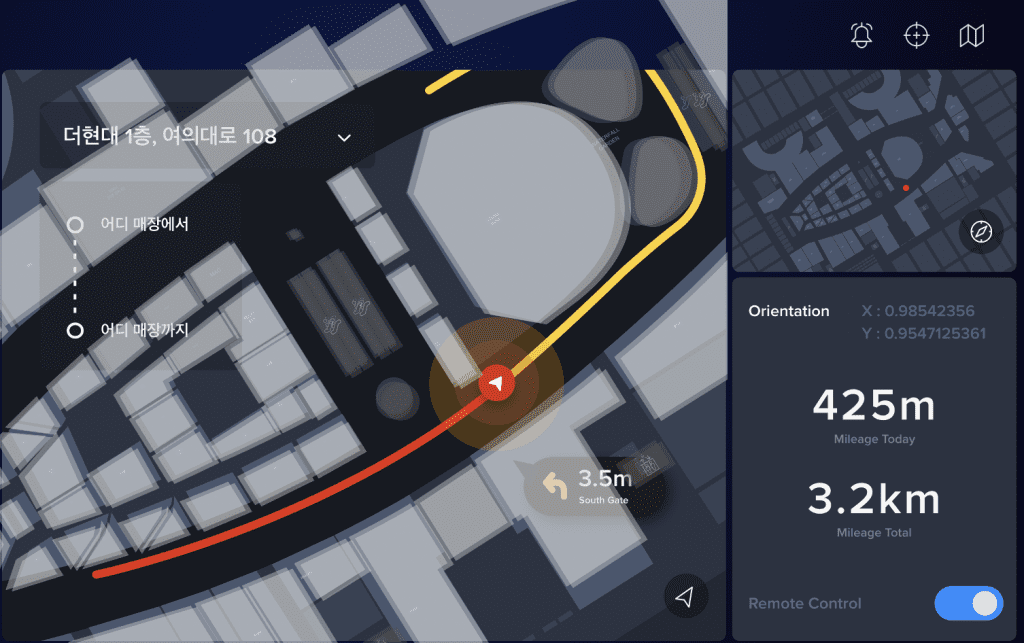
By integrating real-time robot data with sophisticated virtual information systems, Flyinglet can implement real-time robot digital twins to design and execute collaborative missions remotely.
Flyinglet can analyze vast real-time robot data, edit the robot’s path anytime, anywhere, and set the operating method, operating route, and collaboration schedule over the Internet. In addition, detailed tasks such as video, photography, temperature and humidity data measurement, and media content delivery are set and visualized to effectively estimate expected robot behavior patterns and trajectories.
automate,
Flyinglet's real-time robot data verification and restoration program determines the loss and error of data to resolve the inaccurate behavior of autonomous driving or certain functions set on the robot, and enables prevention.
The flyinglet analyzes the environment, spatial information, and population data given to the robot in a sophisticated way to help make the optimal choice. The edge client of the flyinglet manages the robot’s network to perform a given mission autonomously even if it is incomplete.
Flyinglet’s data verification and restoration programs determine, resolve, and fundamentally prevent errors, omissions, or inaccurate behavior of autonomous driving or set functions from the loss of robot data and data downtime.
Flyinglet is enabling advanced hyper-robot services.



Experience Robot Data Science and Digital Twin with Flyinglet
1
Register and connect the robot to the flyinglet cloud.
It is equipped with a flyinglet edge agent for interworking the robot's data and the cloud.
2
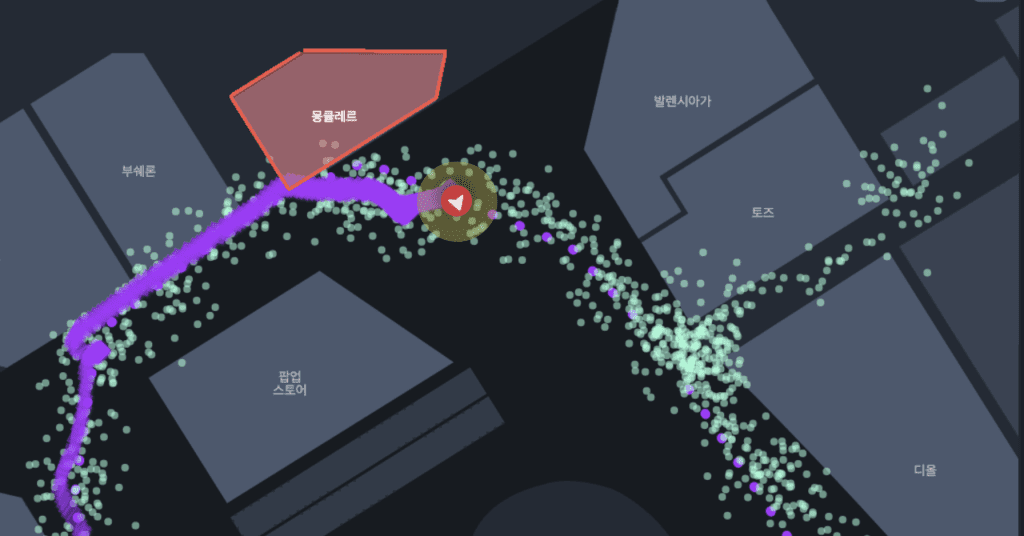
Robots drive and learn in real space, and generate sophisticated virtual maps in real time.
Indoor spaces without GPS require a separate location information system. The robot analyzes the actual spatial data to create a virtualized digital map with a location metaphor, and then detects and learns changes in the environment, such as facility changes, and updates the digital map.
3
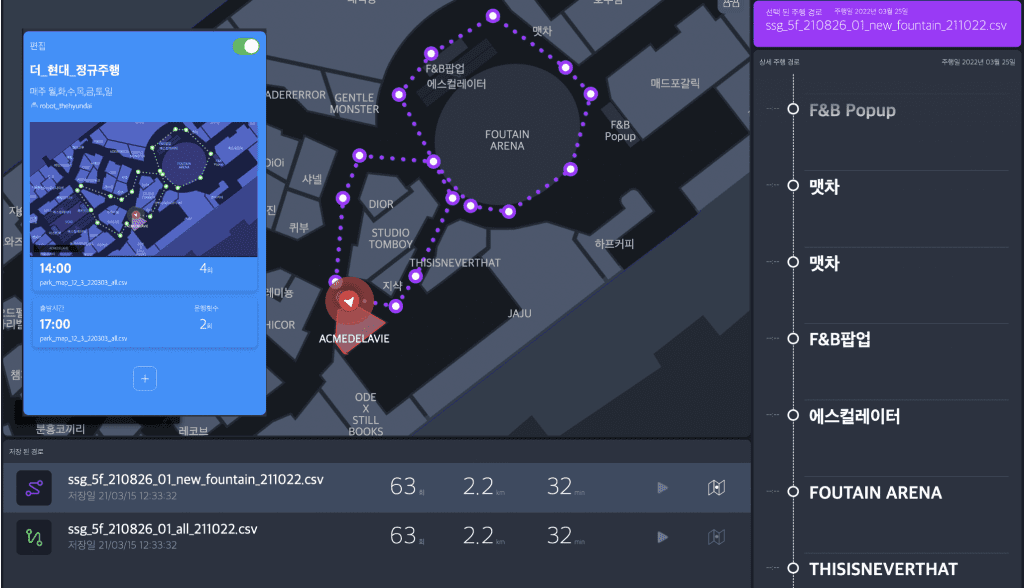
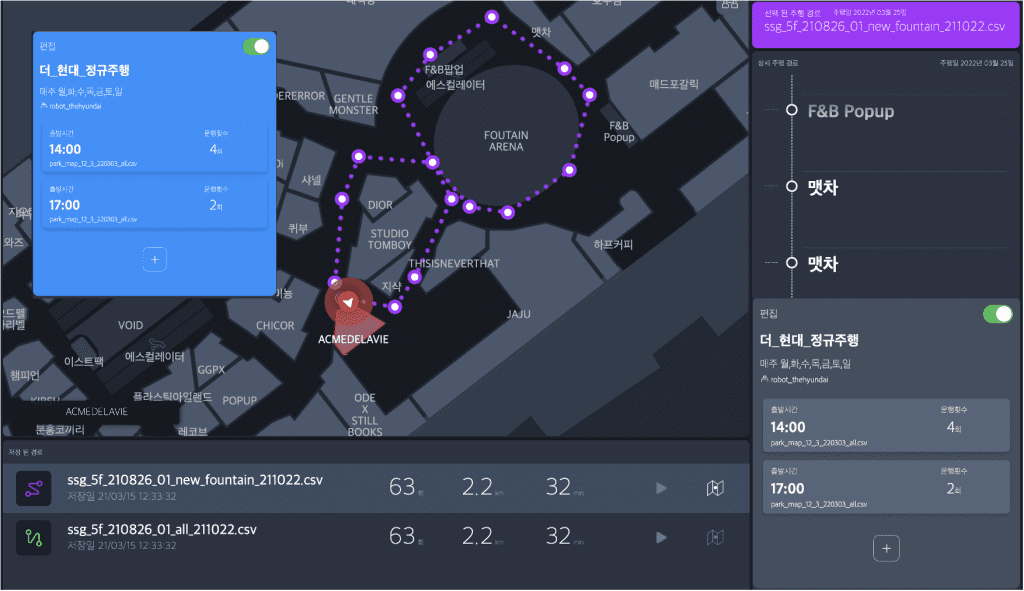
Design the robot's driving route, scenario, and schedule in detail.
Pre-edit the path to the robot and assign tasks. The robot's driving method, driving route (waypoint), day and time of the week. Sets the number of iterations, priority, and so on to the virtual map.
4
Set up specific tasks for the robot by detailed location in space.
Sets the details that the robot will perform in a particular area of the interior space. Set up a target for video, photography, temperature and humidity data measurement, and media (Signy Content) delivery.
5
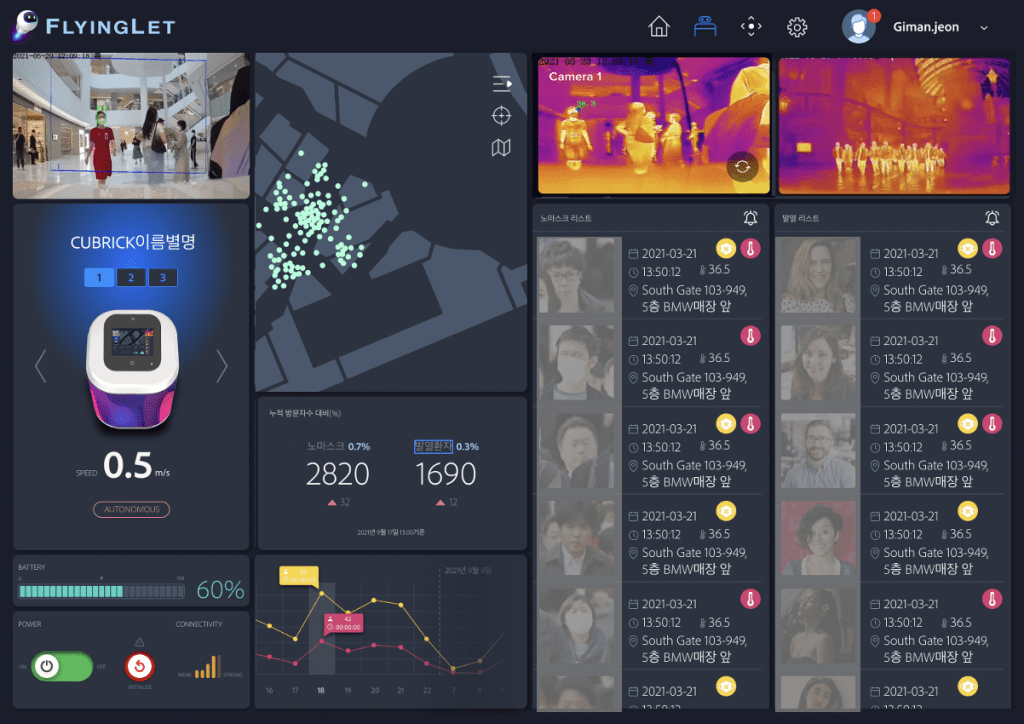
The robot's detection context setting periodically secures visual data.
Set up the robot's detection service context and, when necessary, inspect the designated area of the room by itself and obtain and transmit real-time visual data such as photos and images.
6
Recognize, understand, and visualize space and customers.
Personal information such as facial recognition information and fever information acquired by robots for quarantine detection and space recognition is de-identified and encrypted with a separate algorithm to provide a thorough security process.
Advanced service robots and data sets and pipelines for real-time mobility control and operations.
Flyinglet links various intelligent service robots with outdoor mobility to remotely control autonomous driving and functionality and provide real-time operation monitoring.
It provides an interface for the development of shared services that utilize spaial information such as access, registration, authentication, control, security, management and sharing of driving data, visualization of indoor space, and enhancement of map data. Different indoor autonomous driving robots can upgrade driving performance by utilizing spatial information and indoor environment information. Experience Flyinglet’s professional services for intelligent service robots.
Hyper-robotics 를 위한 선택
It is the beginning of an advanced robot service (RaaS - robot as a service) to have a system that monitors the complex functions and various services of intelligent robots in real time and controls them on its own.
Advanced hyper-robotics, which enables optimal decision-making through reliable data collection, is completed by adding robotic control systems that provide sophisticated autonomous driving, instant tracking and detection, control and visibility.
Robot authentication and security
Robots that are immune to hacking and viruses cannot provide data services that require high levels of security. The access and authentication of the robot is the basis for intelligent robot services.
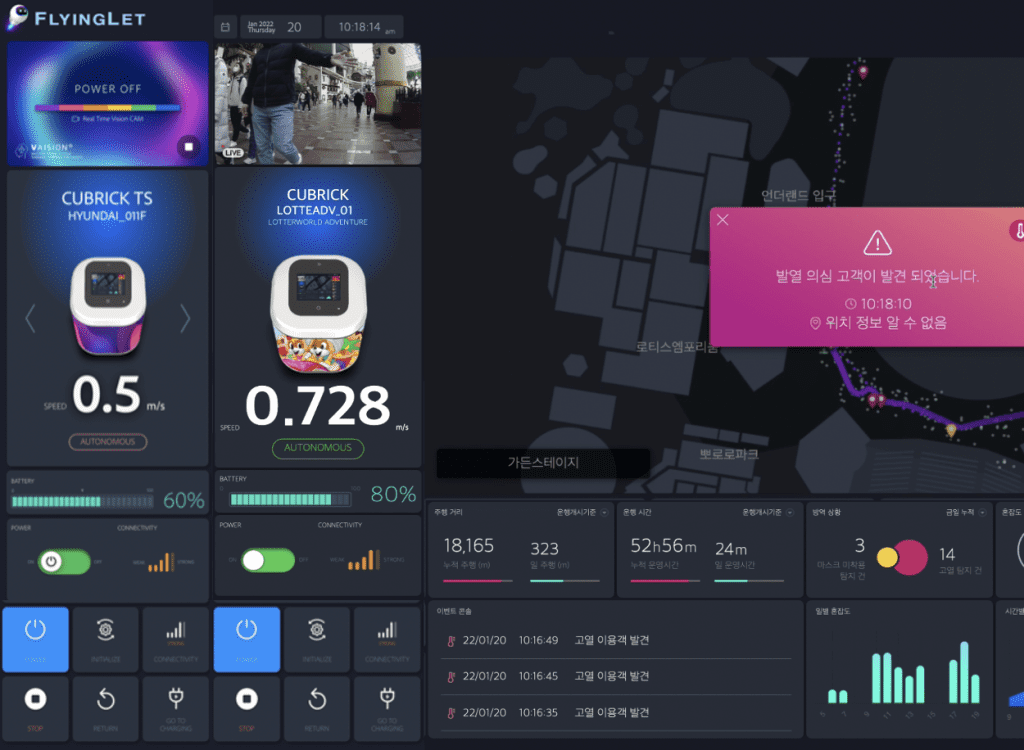
Powerful Observability
It provides visual insights to effectively cope with abnormalities in robot devices and services such as ID of robot devices, specifications and S/W versions of robots, power and battery conditions, and connecting managers.
Control and Control of Autonomous-Driving
In an indoor environment where GPS is not available, the robot’s fine positioning and driving condition are checked in real time and the driving route is actively controlled. It provides essential functions for functional autonomous driving as a one-time solution.
Digital Twin
It provides alternatives for efficient operation and management of service robots, including space-specific mission and schedule management for each device of multi-robot, and decision and allocation of collaboration.
Spatial Data Science
It provides an AI interface for the operation of space-optimized intelligent robots, including space created by multi-robot in real time, environmental information (IoT), and SLAM data storage and reading.
OTA Remote Updates
Through the robot’s self-diagnosis function, device abnormalities are identified, downloaded for fixing and updating the robot’s firmware, and application updates are remotely performed.

Stress-free moving
To maximize the robot's performance, the flyinglet provides a concrete method.
Flyinglet Cloud provides a hyper-network framework that actively controls different bandwidths such as Wi-Fi and Bluetooth, LTE, and 5G. It optimizes vast amounts of data such as video, thermal image data, and night vision generated by robots in various places and environments, minimizes latency, controls robot location, abnormal information, battery information, and autonomous driving, and provides enhanced security systems.
Flyinglet Agent aims to connect various service robots and users directly for the first time in the robot industry to easily use robot functions and services in smartphone applications, tablets, and websites.
A powerful visualization interface and widget-like functional modules can define a variety of services. Detection data including personal information such as robot quarantine safety and security requires a high level of security system, including de-identification.
- Powerful Data Science
- Development Environment Based on Framework Architecture
- A variety of extended APIs
- Real-time Web and Applications
Get Excited to move
Check the following for your intelligent robot!
1
Are sensor data obtained from robots structured into digital data?
The robot’s intelligent services should be controlled remotely through an optimal network. This requires real-time management and control of not only robotic devices, but also data through space detection sensors built into the robot.
2
Is the robot's data safe from external hacking?
Most intelligent robots implemented with ROS open source have very vulnerable structures from external viruses and hacking. Do you deal with the customer’s personal information without countermeasures for robot authentication and security?
3
Is the robot's condition, position, and mission remotely designed and monitored?
In the case of self-driving robots operating in indoor spaces where GPS reception is not possible, if the actual robot’s location cannot be precisely managed in a virtual map space, various additional services cannot be linked, and safety accidents are only a matter of time.
Robot datasets and pipelines for large indoor spaces.
Datasets and pipelines for cutting edge robots provide a high density data matrix to extend the robot's functionality with sophisticated and diverse additional services.

Composed of the DBMS framework architecture, the FlyingLet dataset, and the intelligent connectivity pipeline combine with the Synaptree VL to provide the most effective way to operate advanced service robots.
In addition to the existing SLAM implemented through LiDAR, INTEGRIT has an iSLAM that optimizes and corrects SLAMs through virtualized cloud positioning data to update real-time spatial information and enhance autonomous driving performance. Through sensors, it provides strongly connected intelligence for autonomous driving beyond the existing methods that rely on autonomous driving functions and performance, thereby enhancing robot stability and trust.
The flyinglet is not just a monitoring system.
It provides access, authentication, and security of various autonomous robots, structures the vast amount of real-time device information,
SLAM, spatial information, IoT data, etc. provided by each robot, analyzes data matrix by linking to the cloud, and suggests optimal alternatives.
From multi-robot collaboration and management, function and scheduling, and remote control, the data synchronization system of the flyinglet
can maximize the functions of individual robots, such as risk management, optimized movement,
and real-time intelligent situation measures, and increase operational efficiency.
Flyinglet provides a one-stop remote control and control environment for the development
and operation of various services such as robot interworking, authentication, security, and data control.
Flyinglet is a flexible, scalable framework that can be deployed anytime, anywhere,
providing integrated visibility and robust security with a variety of user interfaces in the form of real-time web, apps, and widgets.
The dataset obtained from the robot is converted into an effective service and visualized by the effects of the robot.
It collects and integrates continuous and meaningful data from various autonomous robots,
and detects robot performance and service anomalies and problems through machine learning and rich data analysis to provide notifications.
Improve safety and confidence by reducing the time to recover and respond to these anomalies.

Analyze rich information about data assets generated from multi-robot and enable each active action to be taken individually.
This data structure and management system can provide flexible and reliable service using robots by preventing ‘data downtime’ incidents that can occur frequently in the field
from the begging, enabling rapid response and automated troubleshooting.
Designed with a flexible and scalable framework,
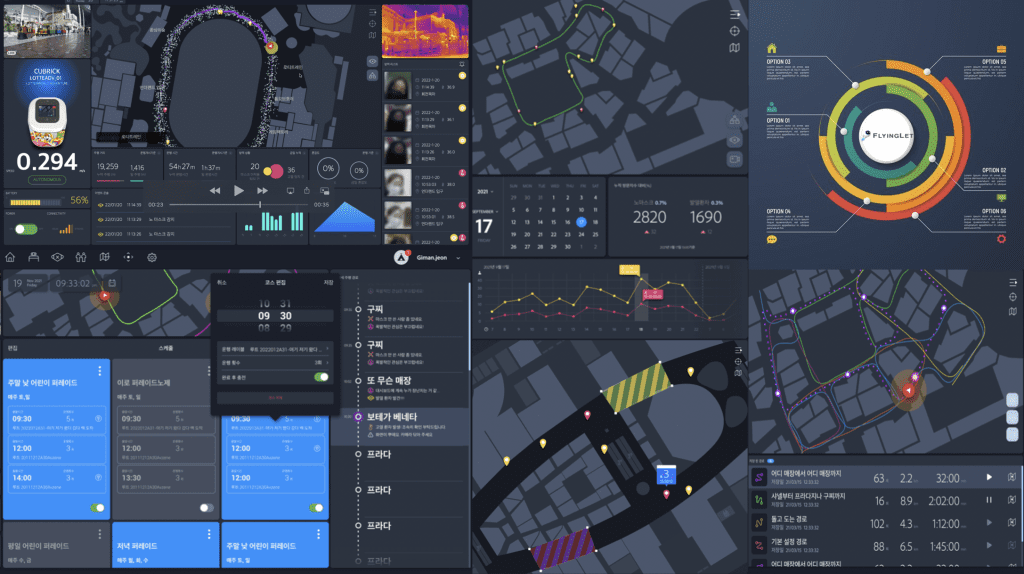
it provides powerful visualization with a variety of user interfaces,
including real-time web and apps.
it provides powerful visualization with a variety of user interfaces,
including real-time web and apps.

")

FlyingLet’s Administrator intuitively and conveniently organizes various functions to help the efficient operation of autonomous driving robots
with various heterogeneous multi-robot specifications and functions.
By opening an interface to develop shared services that utilize spatial information, such as connection, registration, authentication,
control, security, management and sharing of driving data, visualization of indoor space, and enhancement of map data,
we provide an environment where different indoor autonomous robots can access and provide.
It's the beginning of validation, detection,
and secure robot services for better decisions.
Can we guarantee intelligent robot services and safety for unpredictable customers and huge space?
Off-line service companies that run mega stores with thousands of visitors every day are all choosing CUBRICK. CUBRICK is considered the only service robot in Korea that is optimized for elegant spaces that have passed rigorous selection processes like high-level technology and strict safety evaluation.
The way more people can use robots more easily,
Flyinglet is keep thinking for the solution.