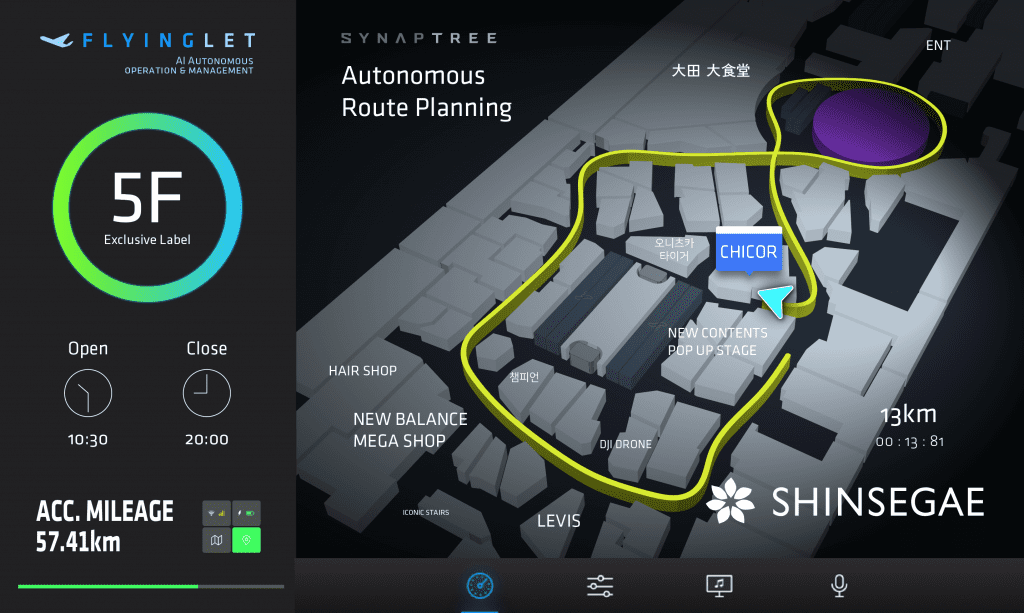
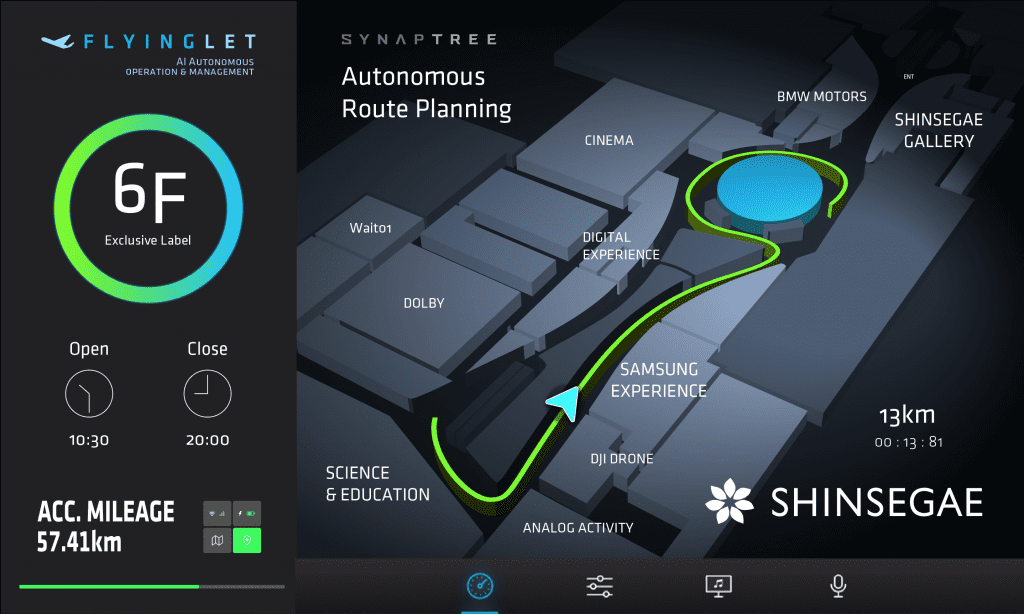
플라잉렛은 실내 공간 데이터셋을 토대로, 구조화된 메타 데이터 가상화 맵을 생성하고, 강력한 시각화 인터페이스를 제공합니다
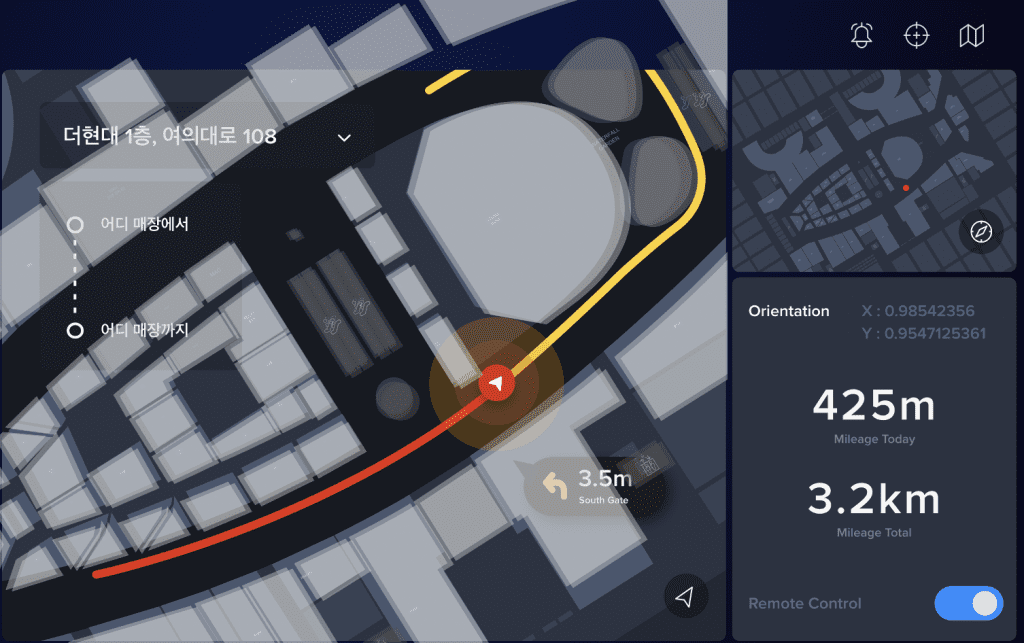
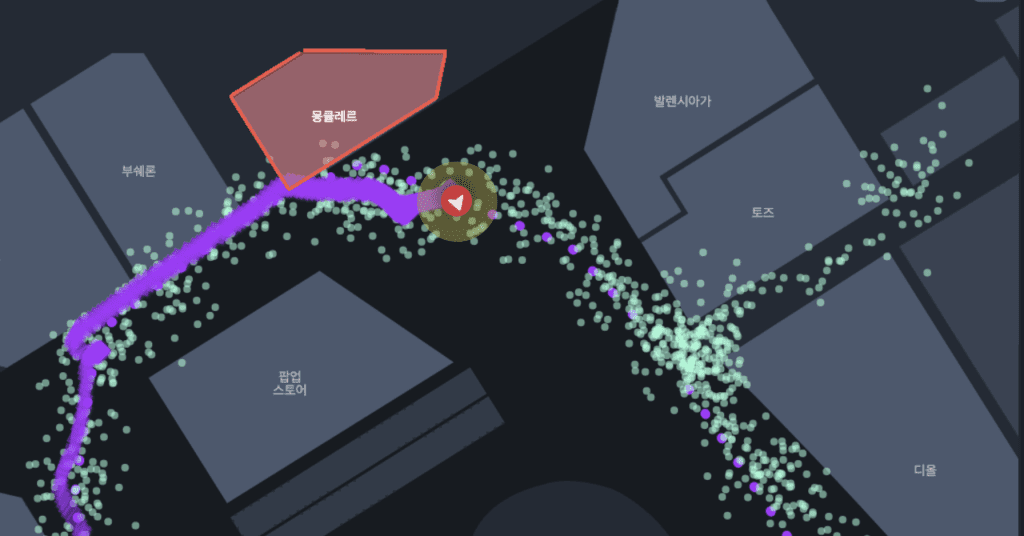
GPS 신호가 없는 실내 공간은 정교한 좌표 체계가 없습니다. 플라잉렛은 로봇으로부터 실시간 취득된 실내 공간 데이터를 분석하여, 정교한 위치 데이타를 측위하는 알고리즘을 제공합니다. 위치 메타포를 가진 정교한 가상지도를 구성하여, 실제 로봇의 위치와 서비스를 정확하게 제어하고, 다양한 디지털 서비스를 가능하게 합니다 이러한 실내 공간정보와 위치측위를 위한 Synaptree 데이터셋은 메타 데이터를 가진 가상화된 디지탈 맵으로 구조화되어 로봇의 정교한 현재 위치와 궤적을 시각화합니다
Responsiveness,
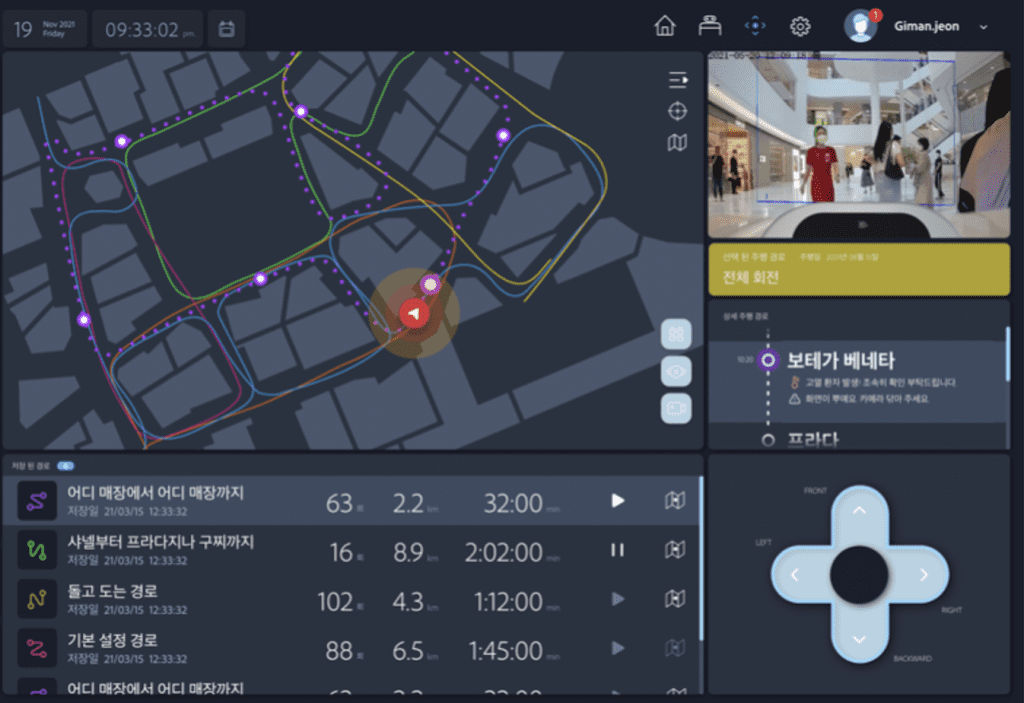
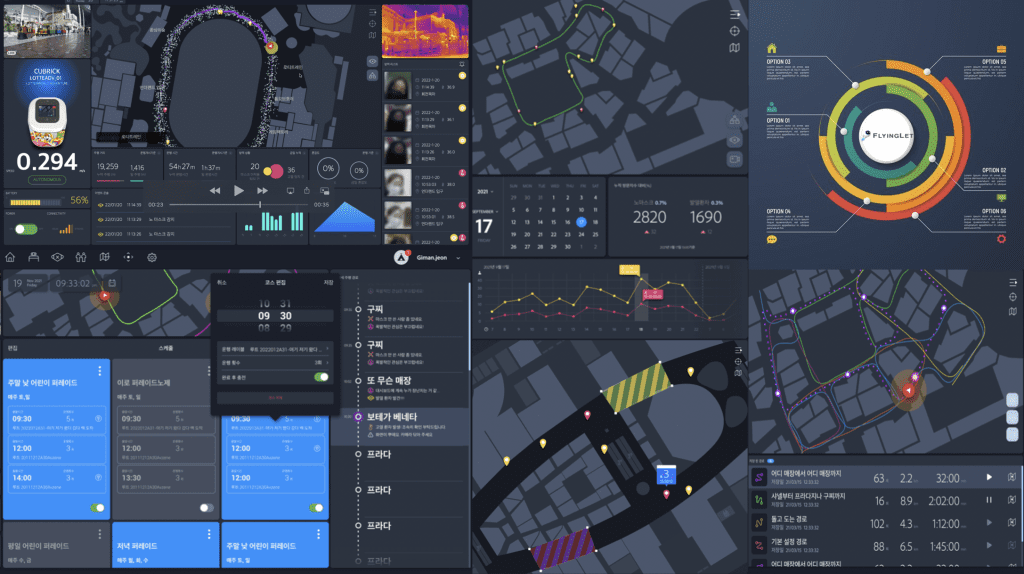
플라잉렛은 실시간 로봇 데이터와 정교한 가상 정보 체계를 통합하여, 실시간 로봇 디지탈 트윈을 구현하여 원격으로 협업 미션을 설계하고 실행할 수 있습니다
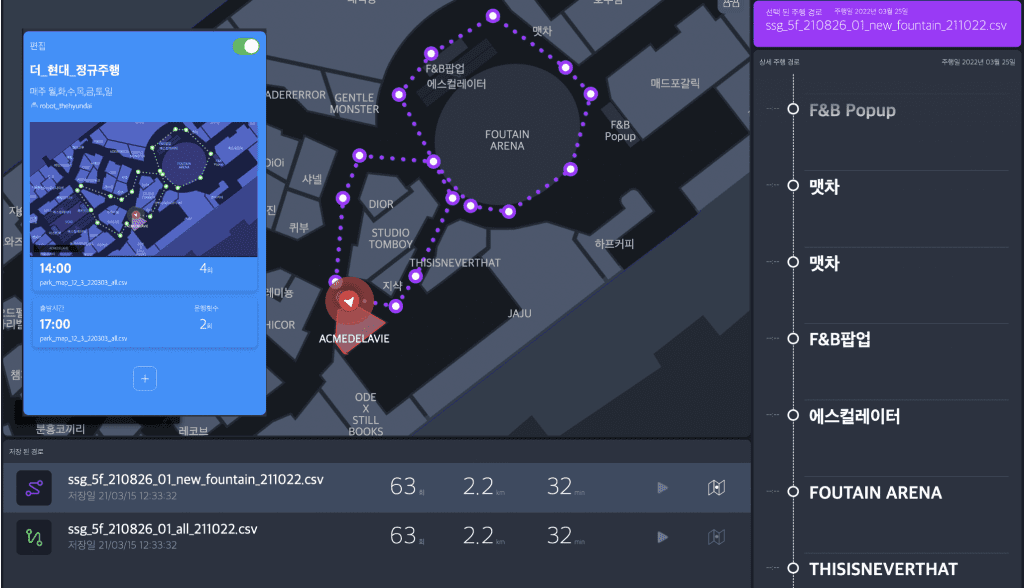
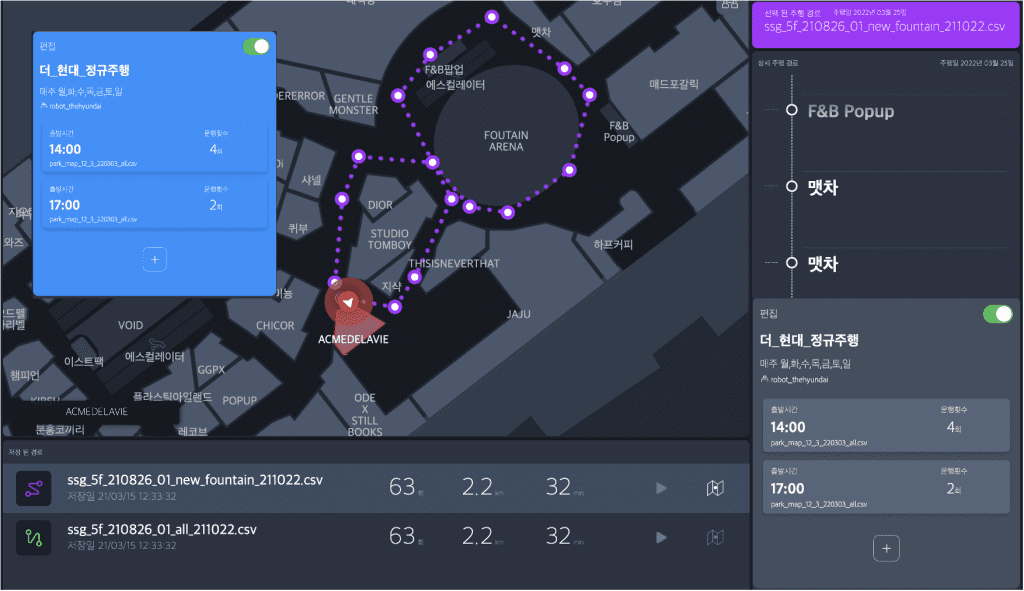
플라잉렛은 방대한 실시간 로봇데이터를 분석하고 위치정보 체계를 통하여, 언제 어디서나 인터넷을 통하여 로봇의 경로를 편집하고 주행방법과 주행경로, 협업 스케줄을 설정할 수 있습니다. 또한, 특정 지역의 동영상, 사진 촬영, 온습도 데이터 측정, 미디어 컨텐츠 전달 등 수행할 세부적인 작업을 설정하고 모시각화 하여, 예상되는 로봇의 행동 패턴과 궤적을 효과적으로 추정하게 됩니다.
automate,
플라잉렛의 실시간 로봇 데이터 검증과 복원 프로그램은 데이터의 유실과 오류를 판정하여 로봇에 설정된 자율주행이나 특정 기능의 부정확한 동작을 해결하며, 사전예방을 가능하게 합니다.
플라잉렛은 로봇에 주어진 환경과 공간정보, 인구데이터를 정교하게 분석해, 최적의 선택을 내릴 수 있도록 돕습니다. 플라잉렛의 엣지 클라이언트는 로봇의 네트워크가 불안전해도, 주어진 미션을 자율적으로 수행할 수 있도록 관리합니다.
플라잉렛의 데이터 검증과 복원 프로그램은 로봇 데이터의 유실과 데이터 다운타임 (Data downtime) 으로부터 자율주행이나 설정된 기능의 오류, 누락 또는 부정확한 동작을 판정하고, 해결하며 근본적으로 사전예방을 가능하게 합니다.
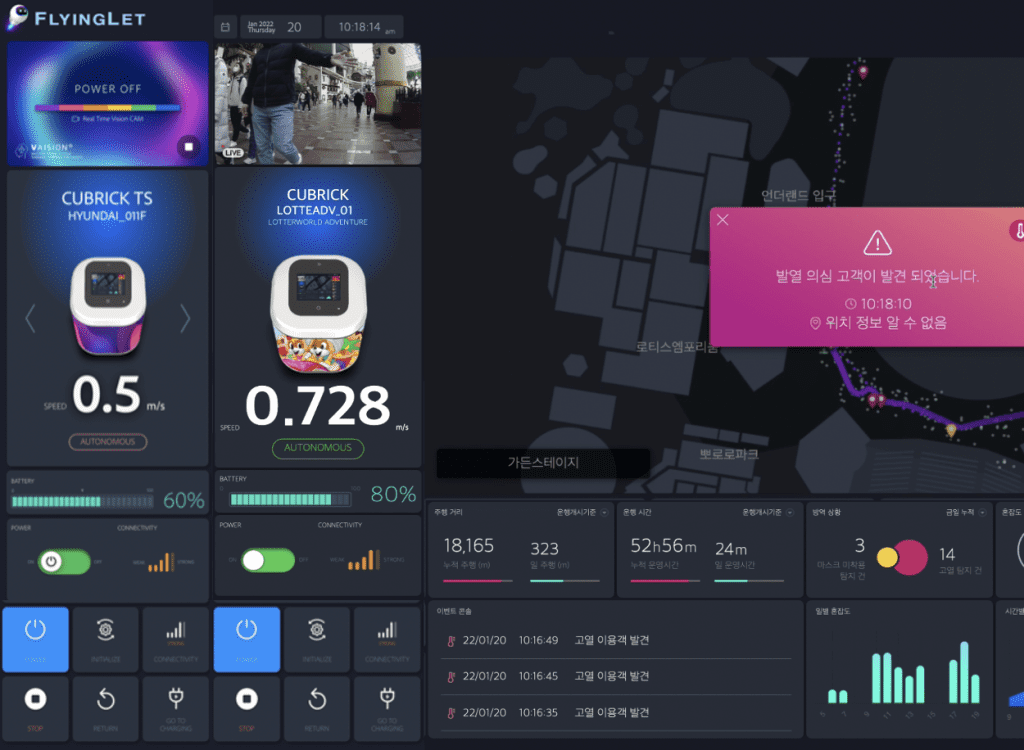
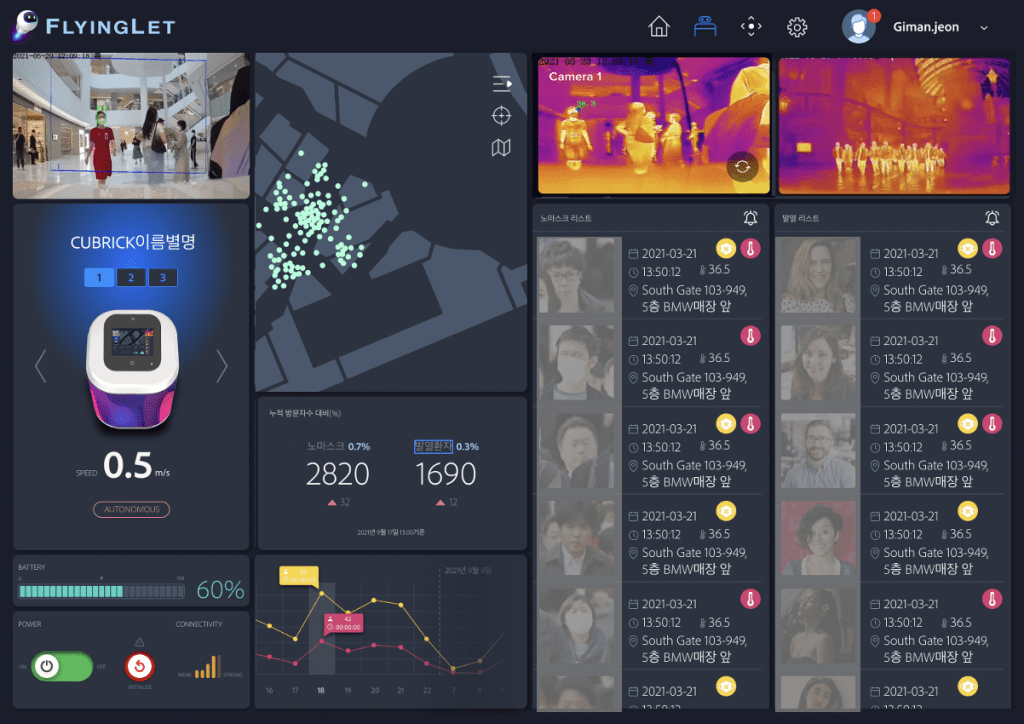
플라잉렛 클라우드는 와이파이와 블루투스, LTX, 5G 등 상이한 대역폭을 능동적으로 제어하는 하이퍼 네트워크 프레임워크을 통해 다양한 공간과 환경에서도 로봇으로부터 생성되는 영상과 열화상 데이터, 나이트 비전 등의 방대한 데이터를 최적화하고 지연시간을 최소화하여 로봇의 위치와 상태, 이상 정보, 배터리 정보와 자율행까지 실시간 제어하고, 보안 체계가 강화된 로봇 운영 서비스를 제공하고 있습니다.
플라잉렛 에이전트는 로봇 업계에서는 최초로 다양한 서비스 로봇과 사용자를 직접 연결해서 로봇의 기능과 서비스를 스마트폰 어플리케이션과 테블릿, 웹사이트 등에서 손쉽게 사용하는 것을 목표로 합니다.
강력한 시각화 인터페이스와 위젯 형태의 기능 모듈은 다양한 서비스를 정의 할 수 있습니다로봇의 방역 안전과 보안, 등 개인정보를 포함하는 탐지 데이터는 비식별화를 포함한 높은 수준의 보안체계가 요구 됩니다.
강력한 데이터 사이언스
프레임워크 아키텍처 기반의 개발환경
다양한 확장 API
실시간 웹과 어플리케이션
Get Excited to move
귀사의 지능형 로봇, 다음을 확인해 보세요!
1
로봇으로 부터 확보한 센서 데이터를 디지털 데이터로 구조화 하고 있나요
로봇의 지능형 서비스는 최적의 네트워크를 통하여 원격으로 통제되어야 합니다. 이를 위해서는 로봇 기기 뿐만 아니라, 로봇에 내장된 공간 탐지 센서를 통한 데이터도 실시간 관리되고 통제될 수 있어야 합니다.
2
로봇의 데이터가 외부의 해킹으로부터 안전하게 보호되고 있나요?
ROS 오픈 소스로 구현된 대부분의 지능형 로봇은 외부의 바이러스, 해킹으로부터 매우 취약한 구조를 가지고 있습니다. 로봇의 인증과 보안을 위한 대책없이 고객의 개인정보를 다루고 있지는 않습니까
3
로봇의 상태, 위치, 미션을 원격으로 설계하고 모니터링되고 있습니까?
GPS 수신이 불가능한 실내 공간에서 운영되는 자율주행 로봇의 경우, 실제 로봇의 위치를 가상의 맵 공간에서정교하게 관리할 수 없다면, 다양한 부가서비스를 연계할 수 없을 뿐만 아니라, 안전 사고는 단지 시간문제 입니다.
대규모 실내 공간을 위한 로봇 데이터셋과 파이프라인,
첨단 로봇을 위한 데이터셋과 파이프 라인은, 높은 밀도의 데이터 매트릭스를 제공하여, 정교하고 다양한 부가 서비스로 로봇의 기능을 확장합니다
DBMS 프레임워크 아키텍처로 구성된, FlyingLet 데이터셋과 지능화된 커넥티비티 파이프라인은, 시냅트리 VL 과 결합하여 첨단 서비스 로봇을 가장 효과적으로 운영하는 방법을 제공합니다.
정교한 실내 공간을 인지하고 정교한 로봇의 위치 제어를 위하여 인티그리트는 기존 라이다 체계를 통해 구현되는 SLAM에 더하여, 실내 구조물을 분류하고 위치 측위 데이터를 가상화한 클라우드를 통하여 SLAM을 최적화하고 보정하는 iSLAM을 구현하여 실시간 공간 정보를 업데이트 함과 동시에 자율주행 성능을 고도화하는 데이터셋 및 시각화 체계를 확보하고 있습니다. 센서를 통하여 자율주행 기능과 성능에 의존하는 기존의 방식을 뛰어넘어 자율주행을 위한 강력한 커넥티드 인텔리전스를 제공하여 로봇의 안정성과 신뢰를 높이고 있습니다.
FlyingLet 의 관리자 인터페이스는 다양한 기능을 직관적이고 편리하게 구성하여 다양한 이기종 멀티 로봇의 사양과 기능을
가진 자율주행로봇의 효율적인 운영을 돕습니다.
다양한 자율주행 기기의 접속과 등록, 인증, 제어, 보안에서부터 주행 데이터의 관리와 공유, 실내 공간의 시각화와 지도 데이터의
고도화 등 공간의 정보를 활용하는 공유형 서비스 개발을 위한 인터페이스를 공개하여 서로 다른 실내자율주행 로봇이 공간정보,
실내 환경정보를 접속해 활용하거나, 공여할 수 있는 로봇의 공유 서비스가 확대될 수 있는 환경을 제공하고 있습니다.
더 나은 결정을 위한 검증과 탐지,
안전한 로봇 서비스의 시작입니다
방대한 면적의 공간, 예측할수 없는 고객을 위한 지능형 로봇 서비스, 안전을 보장할 수 있을까요.
일 방문객 수만명, 수천평에 이르는 초대형 메가 스토어로 국내를 대표하는 오프라인의 서비스 기업들은, 모두가 큐브릭을 선택하고 있습니다. 큐브릭은 높은 수준 기술력과 엄격한 안전성 평가 등 까다로운 선정과정을 통과하여, 품격있는 공간에 최적화된 국내 유일한 서비스 로봇으로 평가받고 있습니다.









")